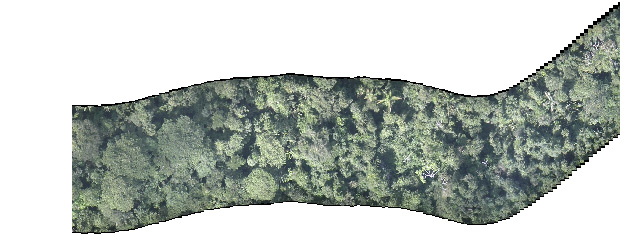
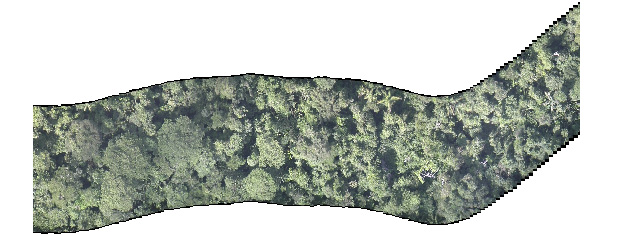
Example 1 : Stereo Mosaics from a Single Video Sequence of a forest scene

Left View Mosaic (full resolution JPEG file, 1.8 MB)


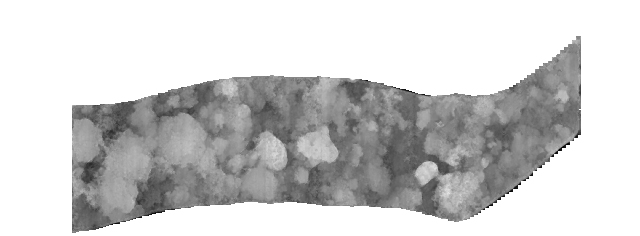
Depth Map ( the brighter, the nearer) (full resolution JPEG file, 384 KB)

Basic Geometry of the stereo mosaics
Let us first assume the motion of a camera is a 1D translation, the optical axis is perpendicular to the motion, and the frames are dense enough. Then, we can generate two spatio-temporal images by extracting two columns of pixels (perpendicular to the motion) at the front and the rear edges of each frame. These mosaic images thus generated are similar to parallel-perspective images captured by a linear pushbroom camera, which has perspective projection in the direction perpendicular to the motion and parallel projection in the motion direction. In contrast to the common pushbroom aerial image, these mosaics are obtained from two different oblique viewing angles of a single camera's field of view, one set of rays looking forward and the other set of rays looking backward, so that a stereo pair of left and right mosaics can be generated as the sensor moves forward.
Since a fixed angle between the two viewing rays is selected for
generating the stereo mosaics, the "disparities" of all points are
fixed; instead geometry of optimal/adaptive baselines for all the
points is created. In other words, for any point in the left
mosaic, searching for the match point in the right mosaic means finding
an original frame in which this match pair has a fixed disparity and
hence has an adaptive baseline depending on the depth of the point.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}