2D Parallel Mosaics for
Under-Vehicle
Inspection
The purpose of this research is to study methods and algorithms of
video
mosaicing for a vision system that will be able to inspect the
undersides of vehicles. The system will create entire images of the
vehicle undersides for both visual inspection and automatic comparison
with previous images stored
in a database. Since cameras are very close to the underside of a
vehicle
under inspection, each camera only covers a small portion of the
underside.
Thus a composite picture covering the entire under-vehicle will be
created
by mosaicing the images from a 2D "array of cameras".
Our approach for solving this problem is to use a line of cameras as
a
scanner. The system will continuously take images as the vehicle drives
over,
then mosaic all of those images into a single image used for
inspection. The
dense coverage of the vehicle bottom by camera images as the vehicle
drives
over allows for relatively easy mosaicing of the vehicle underside
image.
As a result of camera view overlap, we can also create multiple mosaics
with
pseudo-parallel projection representations that preserve the occlusion
information
from different viewing angles in favor of vehicle inspection.
The algorithm design effort will focus on adapting the geo-registered mosaic methodology
developed
for the UMass
environmental
monitoring program to the problem of generating mosaics from a
"virtual"
bed of 2D camera array for under vehicle inspection. Challenging
technical
issues include (1) calibration of the 1D camera array; (2) estimation
of
the motion of the vehicle while creating the mosaics and (3) seamless
mosaicing
with 2D "array of cameras" with different viewpoints. .
To study some of these issues we captured several single-camera
sequences of digital images using the UVIS
(Under
Vehicle Inspection System) laboratory test facility. The results
were
very encouraging. Although some minor geometric distortion was
observed,
we clearly demonstrated the ability of the UMass mosaic algorithm to
create
smooth, topologically correct mosaics under each of the test
conditions.
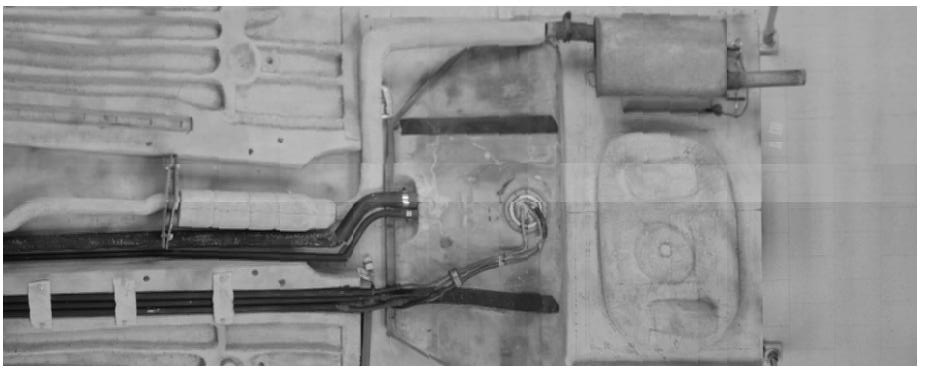
Figure 1 shows a test mosaic made from 4 cameras spaced 4 inches apart
with
a 45 degree field-of-view.
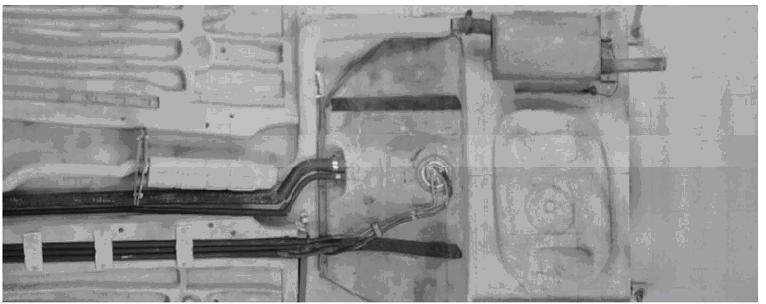
Figure 1. A test mosaic made from 4 cameras spaced 4 inches apart
with
a 45 degree field-of-view (click picture for the high-resolution
version)
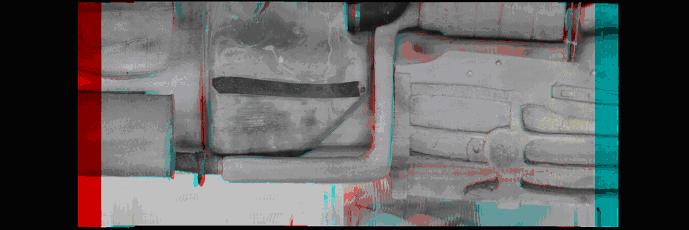
Figure 2. Stereo mosaics for 3D recovery or direct 3D viewing (
click picture to download a Powerpoint slide showing multiple stereo
mosaics from
5 different viewing directions)
Collaborators:
Howard Schultz, Senior Research Scientist
Gary Whitten, Research Faculty
Allen R. Hanson, Professor
Edward M. Riseman, Professor
Paul Dickson, graduate student
James Li, undergraduate student
Related Publications
- Z.
Zhu, A. R. Hanson, Mosaic-Based
3D
Scene Representation and Rendering, Special Session on
Interactive Representation of Still and Dynamic Scenes, the Eleventh
International Conference on Image Processing,
Genova, Italy, September 11-14, 2005, pp I-633
-636.
- Z.
Zhu, Stereo Mosaics with Slant
Parallel Projections from Many Cameras or a Moving Camera. AIPR
2003: Imagery and Data Fusion, Washington DC, October 15-17, 2003
- P. Dickson, J. Li, Z. Zhu, A. Hanson, , E. Riseman, H. Sabrin, H.
Schultz and G. Whitten, Mosaic generation for
under-vehicle inspection. IEEE Workshop on Applications of
Computer Vision, Orlando, Florida, Dec 3-4, 2002.
Related
projects:
Atlantic Coast Technologies, Inc. (industrial
subcontract), Under-Vehicle
Inspection System (UVIS), 01/01/01-12/31/01
Back to Zhigang's Homepage